2023年 春期 応用情報技術者試験 問7
位置通知タグの設計
E社は、GPSを使用した位置情報システムを開発している。今回、超小型の位置通知タグ(以下、PRTという)を開発することになった。
PRTは、ペンダント、ブレスレット、バッジなどに加工して、子供、老人などに持たせたり、ペット、荷物などに取り付けたりすることができる。利用者はスマートフォンはPC(以下、端末という)を用いて、PRTの現在及び過去の位置を地図上で確認することができる。
PRTの通信には、通信事業者が提供するIoT用の低消費電力な無線通信回線を使用する。また、PRTは本体内に小型の電池を内蔵しており、ワイヤレス充電が可能である。長時間の使用が要求されるので、必要な時間に必要な構成要素にだけ電力を供給する電源制御を行っている。
【位置情報システムの構成】
PRTを用いた位置情報システムの構成を図1に示す。
端末がPRTに位置情報を問い合わせたときの通信手順を次に示す。
① 端末は、PRTの最新の位置を取得するための位置通知要求をサーバに送信する。
サーバは端末からの位置通知要求を受信すると、通信事業者を介して、PRTと通信可能な基地局に位置通知要求を送信する。
② PRTは電源投入後、基地局から現在時刻を取得するとともに、サーバからの要求を確認する時刻(以下、要求確認時刻という)を受信する。以降の要求確認時刻はサーバから受信した要求確認時刻から40秒間隔でスケジューリングされる。
PRTは要求確認時刻になると、基地局からの情報を受信する。
③ 基地局は要求確認時刻になると、PRTへの位置通知要求があればそれを送信する。
④ PRTは基地局からの情報に位置通知要求が含まれているかを確認する処理(以下、確認処理という)を行い、位置通知要求が含まれていると、基地局、通信事業者を介して、PRTの最新の位置情報をサーバに送信する。
⑤ サーバはPRTから位置情報を受信し、管理する。サーバは端末と通信し、PRTの最新の位置情報、指定された時刻の位置情報を地図情報とともに端末に送信する。
端末は、受信した位置情報及び地図情報を基に、PRTの位置を地図上に表示する。
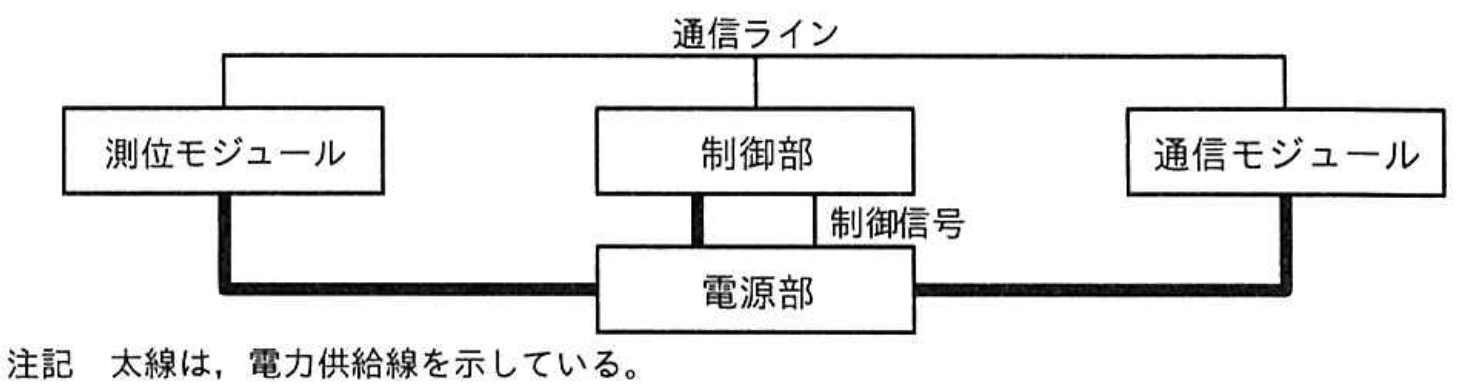
【PRTのハードウェア構成】
PRTのハードウェア構成を図2に、PRTの構成要素を表1に示す。
| 構成要素 | 説明 |
|---|---|
| 制御部 | ・タイマー、CPU、メモリなどから構成され、PRT全体の制御を行う。 ・CPUの動作モードには、実行モード及び休止モードがある。実行モードでは命令の実行が可能で、休止モードでは命令の実行を停止し、消費電流が最小となる。 ・CPUは休止モードのとき、タイマー、測位モジュール、通信モジュールからの通知を検出すると実行モードとなり、必要な処理が完了すると休止モードとなる。 |
| 測位モジュール | ・GPS信号を受信(以下、測位という)してPRTの位置を取得し、位置情報を作成する。 ・電力が供給され、測位可能になると制御部に測位可能通知を送る。 ・制御部からの測位開始要求を受け取ると測位を開始する。測位の開始から6秒経過すると測位が完了して、測位結果通知を制御部に送る。 |
| 通信モジュール | ・基地局との通信を行う。 ・電力が供給され、通信可能になると制御部に通信可能通知を送る。 ・制御部から受信要求を受け取ると、確認処理を行い、制御部へ受信結果通知を送る。 ・制御部から送信要求を受け取ると、該当するデータをサーバに送信する。データの送信が完了すると、送信結果通知を制御部に送る。 |
| 通信ライン | ・制御部と測位モジュールとの間、又は制御部と通信モジュールとの間の通信を行うとき使用する。 ・通信モジュールとの通信と、測位モジュールとの通信が同時に行われると、そのときのデータは正しく送受信できずに破棄される。 |
| 電源部 | ・制御部からの制御信号によって、測位モジュール及び通信モジュールへの電力の供給を開始又は停止する。 |
【PRTの動作仕様】
・40秒ごとに確認処理を行い、基地局から受信した情報に位置通知要求が含まれている場合、測位中でなければ、測位を開始する。測位の完了後、PRTの位置を取得したら位置情報を作成する(以下、測位の開始から位置情報の作成までを測位処理という)。測位処理完了後、位置情報をサーバに送信する。また、測位の完了後、PRTの位置取得に失敗したときは、失敗したことをサーバに送信する。
・120秒ごとに測位処理を行う。失敗しても再試行しない。
・600秒ごとに未送信の位置情報をサーバに送信する(以下、データ送信処理という)。
【使用可能時間】
電池を満充電後、PRTが機能しなくなるまでの時間を使用可能時間という。その間に放電する電気量を電池の放電可能容量といい、単位はミリアンペア時(mAh)である。PRTは放電可能容量が200mAhの電池を内蔵している。
使用可能時間,放電可能容量,PRTの平均消費電流の関係は、次の式のとおりである。
使用可能時間 = 放電可能容量 ÷ PRTの平均消費電流
PRTが基地局と常に通信が可能で、測位が可能であり、基地局から受信した情報に位置通知要求が含まれていない状態における各処理の消費電流を表2に示す。表2の状態が継続した場合の使用可能時間はa時間である。
なお、PRTはメモリのデータの保持などで、表2の処理以外に0.01mAの電流が常に消費される。
| 処理名称 | 周期 (秒) | 処理時間 (秒) | 処理中の消費電流 (mA) | 各処理の平均消費電流 (mA) |
|---|---|---|---|---|
| 確認処理 | 40 | 1 | 4 | 0.1 |
| 測位処理 | 120 | 6 | 10 | 0.5 |
| データ送信処理 | 600 | 1 | 120 | 0.2 |
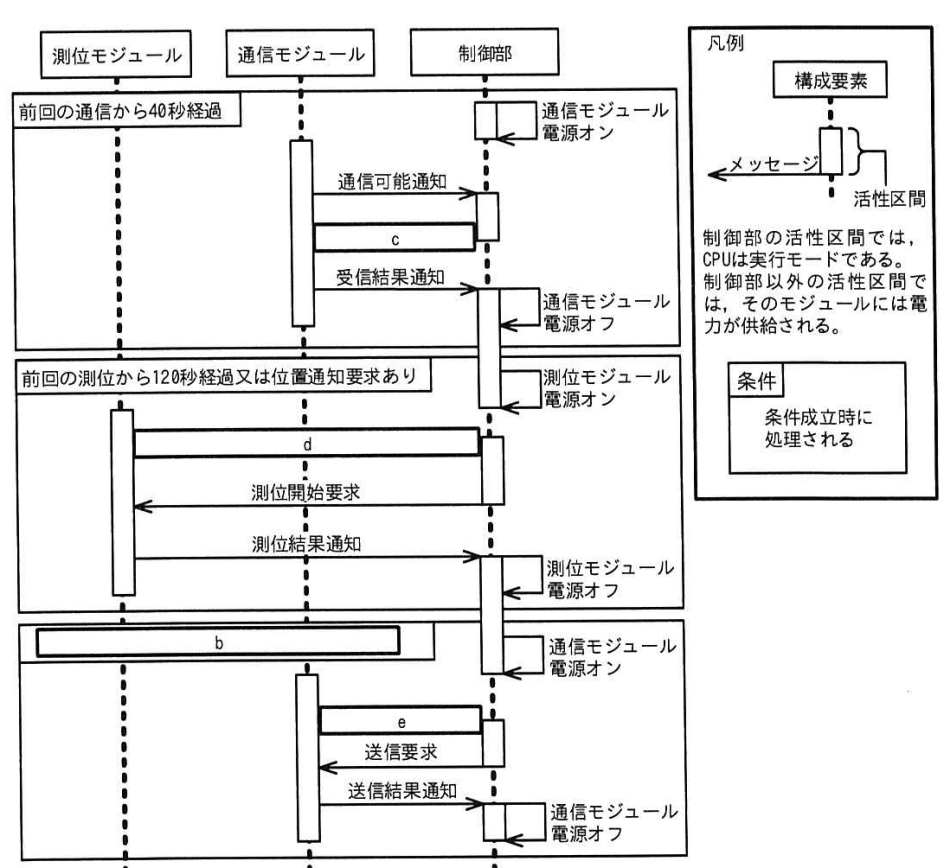
【制御部のソフトウェア】
最初の設定ではタイマーを二つ用いた。初期化処理で、120秒ごとに通知を出力する測位用タイマーを設定し、初期化処理完了後、サーバからの要求確認時刻を受信すると、40秒ごとに通知を出力する通信用タイマーを設定した。しかし、この設計では不具合が発生することがあった。
不具合を回避するために、タイマーを複数用いず、要求確認時刻を用いて40秒ごとに通知を出力するタイマーだけを設定した。このタイマーを用いて、図3に示すタイマー通知時のシーケンス図に従った処理を実行するようにした。